Swinburne-CSIRO National Industry 4.0 Testlab
Design of a flexible robotic end-effector for Composite Manufacturing
back to project overview GWiEIT
Project
The Swinburne-CSIRO National Industry 4.0 Testlab for Composite Additive Manufacturing is a cutting-edge facility that offers digitally supported engineering and manufacturing solutions for various industries, including automotive, aerospace, and production. The centrepiece of the Testlab is the world's first industrial-scale 3D printing multilayer approach to near net composite manufacture.
The goal of our student project is to design a revolutionary flexible robotic end-effector system. This innovative system aims to streamline the manufacturing process of carbon fiber parts at an industrial scale. The end-effector's design is driven by multiple essential requirements, ensuring its versatility and adaptability to various production scenarios.
- Pickup and Placement of 2D and 3D Parts
- Compatibility with All Materials
- Modular "Plug-and-Play" Design
- No Bending / Low Weight
- Automated Gripper Position Adjustment
- Verification of Part Placement
- Part Detection / Tracking / Data Collection
- Compatibility with Production Line Constraints
Our student project seeks to demonstrate the capabilities and potential of this innovative robotic end-effector system to future industry partners. By providing an efficient, flexible, and precise solution for composite manufacturing, this technology promises to revolutionize the production processes and enable the creation of high-quality carbon fiber parts in short cycle times.
Project Team
Meet the brilliant minds behind the innovative Flexible Robotic End-Effector project! Our diverse and talented team of students from different universities has come together to tackle the challenges of composite manufacturing and robotics. Let's get to know them from left to right:
Yasemin Groß
Study: Applied Computer Science (B.Sc.), HTW Berlin
Motivation: Yasemin's passion for working in an international and female-dominated project led her to join our team. She believes in the power of diversity and inclusivity in driving groundbreaking innovations.
Responsibilities: Yasemin's expertise shines as she takes charge of various critical aspects, including managing the project website, serving as the skilled Scrum Master, ensuring efficient collaboration with Git, and exploring the digital twin technology with Mindsphere.
Elise Schwentesius
Study: Computer Science and Business Administration (B.Sc.), HTW Berlin
Motivation: Empowerment and international collaboration inspires Elise to be a part of this exceptional project. She values the opportunity to contribute to a project that supports and uplifts women.
Responsibilities: Elise's contributions are invaluable, particularly in the Vision System domain. Her organization and communication skills help keep the team in sync and foster a positive working environment.
Julian Pirotta
Study: Robotics and Mechatronics Engineering (B. Eng.), SUT Melbourne
Motivation: Julian joined the project as the end of his degree approached, seeking an opportunity to work on an exciting group project combining it with traveling overseas. Upon acceptance, he was thrilled to engage with a different culture and be exposed to new ideas. Julian's involvement in the project exposed him to various industry ideas, including digital twin technology, SCRUM management, and more. These experiences have expanded his horizons and provided invaluable insights for his future career.
Responsibilities: As Product Owner (PO), Julian played a crucial role in effective communication with the customer. He adeptly ascertained the needs and concerns of the customer and communicated them clearly and efficiently with the team.
Eva Sihag
Study: Robotics and Mechatronics (B.Eng. - Honors), SUT Melbourne
Motivation: With a passion for robotics and a desire to work alongside industry partners, Eva chose this project as her Capstone endeavor. She thrives in diverse teams and is excited about the opportunity to create something extraordinary together.
Responsibilities: Eva's mechanical expertise takes center stage as she contributes to the project with her major focus on Mechanical and Vision Systems. She played a key role in ideation and integrating the end-effector with the quick change tool adapter. Additionally, her vision system skills were vital in image capture, saving, exporting, and developing the dashboard application.
Yelizaveta Guryanova
Study: Mechanical Engineering (B.Sc.), HTW Berlin
Motivation: Yelizaveta is excited to be part of an international team, collaborating with interesting industry partners. Applying her knowledge in practical projects and gaining a deeper understanding of Industry 4.0 topics fuels her passion. Being part of an inspiring community of women is an added delight.
Responsibilities: Yelizaveta plays a vital role in the project, providing support in developing mechanical systems. She is also actively involved in implementing the placement process for a vision system. Her expertise in SCRUM (Jira board) ensures effective project management and team collaboration.
Project Results
We embarked on the following key steps:
1. Background Research on End-Effectors and Gripper Systems
Traditional Two-Finger Gripper:
The two-finger gripper is a classic design used since
the early days of robotics, including the renowned Unimate. It offers easy determination of
gripping force through simple physics equations.

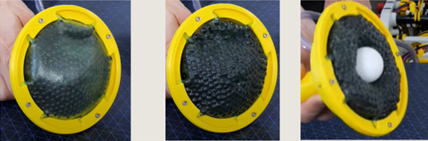
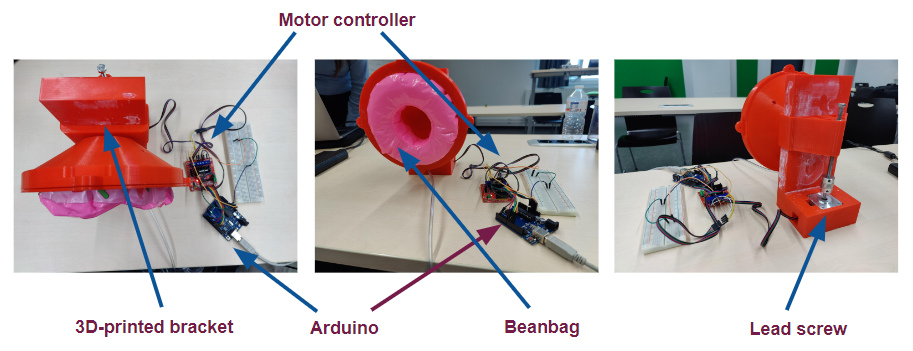
Bean-Bag Concept:
The universal gripper concept with its moldable capability around
complex 3D objects was considered. A donut-shaped gripper, paired with a second pump to function
as a suction cup, could address issues with flat near-2D shapes.
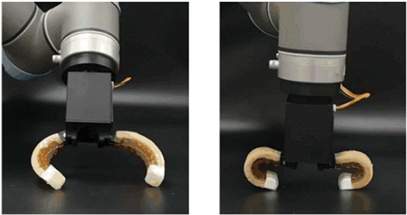
Soft Robotic Hand:
The soft robotic hand gripper, while smart and capable of picking up most 3D
geometries, may encounter challenges with flat parts. Manufacturing complexity might require external
assistance.
Octopus-Inspired Robotic Gripper:
Inspired by nature, the bio-inspired robotic arm can grasp
various geometries, but implementation hurdles include knowledge gaps, limited resources, and time
constraints.

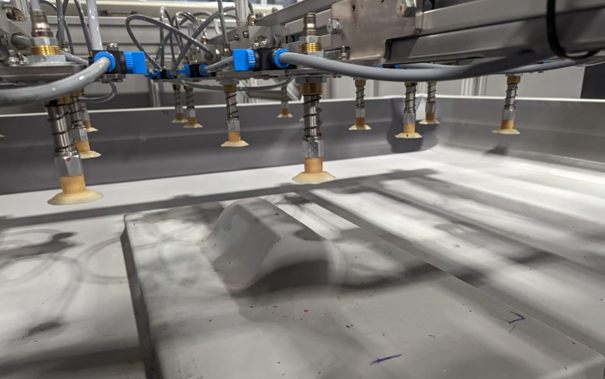
2. Analysis of Current End-Effector and Design Constraints
The current end-effector at the TestLab offers limited functionality, capable of picking up 2D parts only with a bulky design. Design constraints arise from TestLab equipment layout and working area, necessitating properties such as light weight, modularity, ease of movement, and correct part placement verification.
3. Definition of Best Pick Up Strategies for 2D and 3D Parts
The team conducted a systematic comparison of design concepts, leading to the selection of the most suitable strategies for pick up from the top of the part, maintaining a firm grip throughout the delivery process, and employing virtual and physical rapid prototyping.
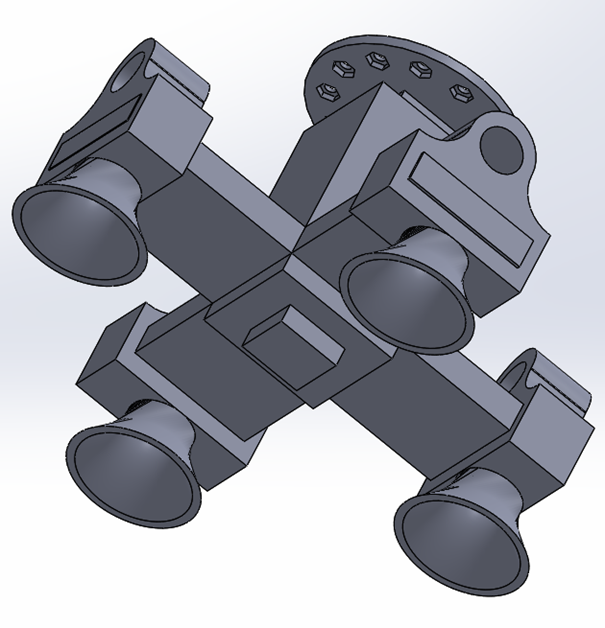
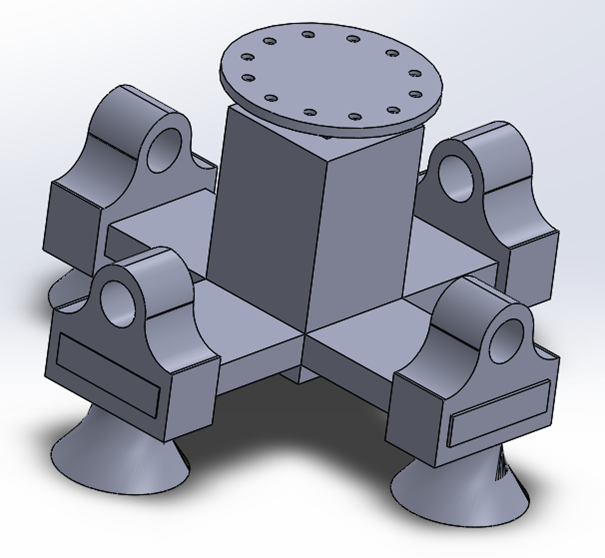
Based on a weighted decision matrix, this is the final end-effector design:
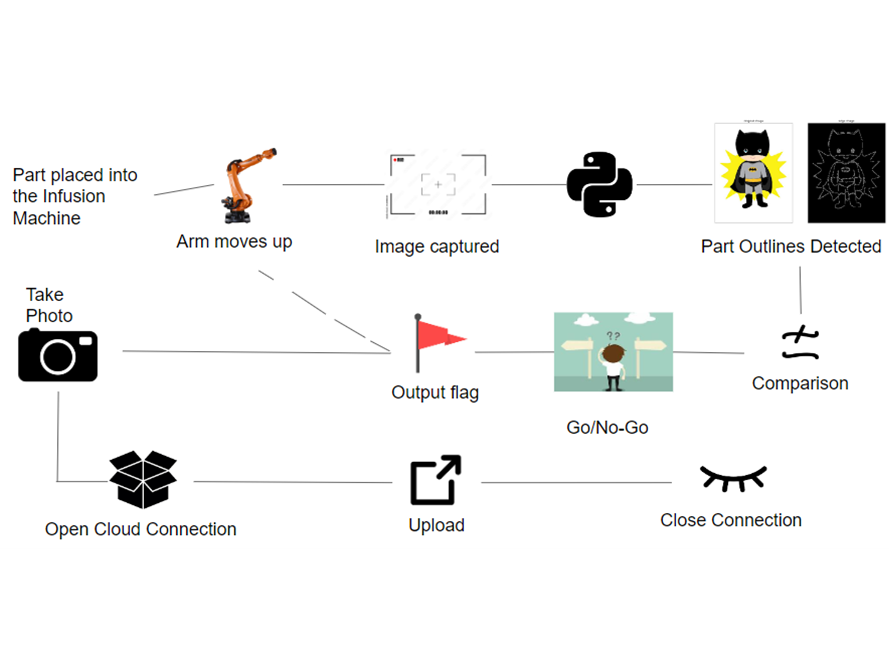
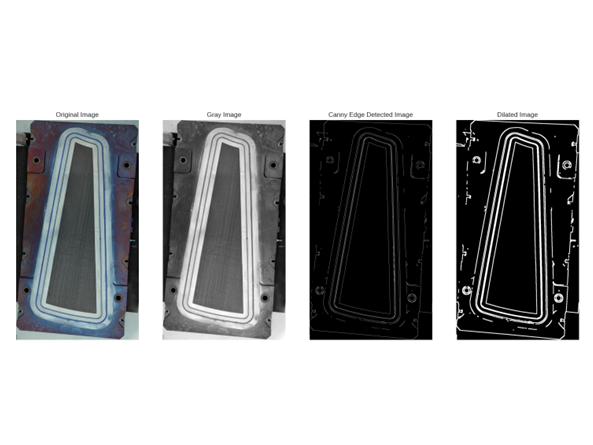
4. Part Detection and Data Flow
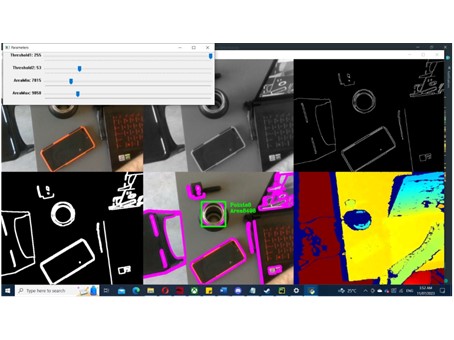
The team made critical decisions about camera selection, reference system, part detection methods, handling light noise (glare or reflection), distinguishing parts from the background, comparing parts, calculating thresholds, documenting parts, and integrating images into Mindsphere. Error code recording and storage were also addressed.

5. Digital Twin
The team thoroughly tested Mindsphere's functionalities, including the Asset Manager, Product Twin, and Visual Flow Creator, contributing to the exploration and understanding of digital twin technology.
6. Used Technologies
We implemented various technologies, including:
Programming: Python, computer vision libraries (Numpy, CV2)
3D Sensing: Intel RealSense SDK 2.0
IoT Platform: Siemens Mindsphere (Asset Manager, Product Twin, Visual Flow Creator)
CAD Software: SolidWorks
3D Printing: Cura (Slicing Software for 3D Printing)
Microcontroller Programming: Arduino IDE (Motor Control)
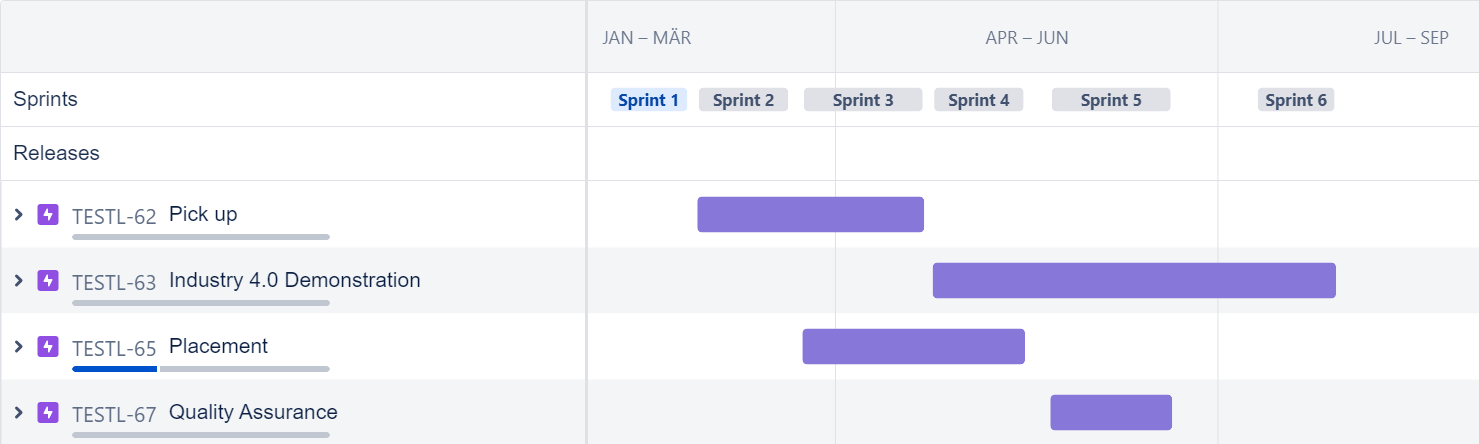
Project Management
We followed the agile project management approach with five sprints. A Scrum Board on Jira helped to keep track of the project: